

Le servomoteur est un moteur électrique qui peut être utilisé pour contrôler la position d’un objet. Il est très pratique pour les applications qui nécessitent une précision et une fiabilité élevées. La positionnement d’un servomoteur peut être réalisé à l’aide d’une résistance variable, ce qui permet de régler la position du servomoteur avec une précision et une fiabilité élevées. Dans cet article, nous allons expliquer comment positionner un servomoteur à l’aide d’une résistance variable et quels sont les avantages et les inconvénients de cette méthode.
Positionner un servomoteur à l’aide d’une résistance variable

1. Présentation
Ce programme Positionne un servomoteur à l’aide d’une résistance variable (potentiomètre) 10K. On remarquera toute la puissance du langage Arduino qui nous permet de caler la position du servomoteur sur la mesure issue de la résistance variable en seulement 3 instructions !
Ce programme utilise les fonctionnalités suivantes :
- la conversion analogique numérique 10bits sur les voies analogiques analog 0,
- un ou plusieurs servomoteurs
2. Matériel Nécessaire
2.1 L’espace de développement Arduino
- … pour éditer, compiler le programme et programmer la carte Arduino.

2.2 Le matériel suivant pour réaliser le montage associé
- une plaque d’essai pour montage sans soudures,
- des straps,
- une résistance variable linéaire de 10 KOhms,

- servomoteur
3. Instructions de montage
- Connecter sur la broche 2 (configurée en sortie) la broche de commande d’un servomoteur. la broche de commande d’un servomoteur.
- Broche Analog 0 (=broche 14) en entrée Analogique : connecter la sortie d’une résistance variable connectée entre 0V et 5V.
- Connecter les servomoteurs sur les broches de commandes utilisées
- Dans le cas d’une carte Arduino :
- l’intensité maximale disponible sur une broche est de 40mA
- l’intensité maximale cumulée pour l’ensemble des broches est 200mA
- l’instensité maximale que peut fournir l’alimentation 5V de la carte est 500mA.
- Par conséquent, avec une carte Arduino :
- En ce qui concerne la ligne de commande du servomoteur par la carte Arduino :
- on pourra commander directement autant de servomoteur que l’on veut (broche de commande) avec une carte Arduino, le nombre maximal étant 200mA / I commande, soit 100 environ dans le cas du Futaba S3003, ce qui est largement supérieur au nombre de broches de la carte.
- Il n’y aura par ailleurs pas besoin d’amplification (type ULN 2803) sur la ligne de commande du servomoteur même si l’on utilise un grand nombre de servomoteurs.
- En ce qui concerne l’alimentation principale des servomoteurs par une carte Arduino
- on ne peut alimenter que 3 à 4 servomoteurs simultanément par l’alimentation 5V de la carte Arduino, le nombre maximal étant 500mA / I fonctionnement = 500 / 120 = 4 servomoteurs dans le cas du Futaba S3003.
- Une alimentation externe sera indispensable dès que l’on dépassera ce nombre pour ne pas risquer de « griller » la carte Arduino.
- En ce qui concerne la ligne de commande du servomoteur par la carte Arduino :
Pour plus de détails, voir : Principes d’utilisation des alimentations avec une carte Arduino et des servomoteurs
4. Le schéma théorique du montage
Le schéma théorique du montage
5. Le circuit du montage
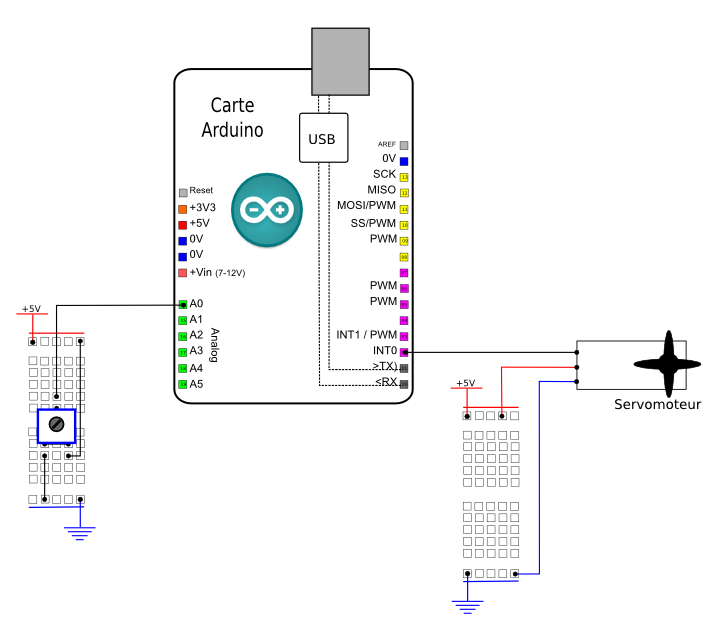
Le schéma du montage à réaliser
6. Explication du programme
6.1 Structure globale du programme
Ce programme simple comprend :
- une entête déclarative
- une partie « configuration » qui ne sera exécutée qu’une fois (fonction setup( ) )
- une partie constituée d’une boucle sans fin que le programme répètera à l’infini ( fonction loop( ) ) : c’est le coeur du programme.
6.2 Déroulement du programme
Le programme se déroule de la façon suivante :
- Après avoir pris en compte les instructions de la partie déclarative,
- puis après avoir exécuté la partie configuration ( fonction setup( ) ),
- le programme bouclera sans fin ( fonction loop ( ) ), exécutant de façon répétée le code compris dans la boucle sans fin.
Le déroulement du programme
7. Au niveau de la partie déclarative :
Inclusion des librairies utilisées
- On inclut les librairies des fonctionnalités utilisées :
- Inclusion de la librairie pour les servomoteurs :
#include <Servo.h> // librairie pour servomoteur
Déclaration de constantes utiles
- On déclare les constantes utiles dans le programme :
- Déclaration des constantes utiles pour les servomoteurs :
const int POS_MIN=550; // largeur impulsion pour position 0° servomoteur
// POS_MIN=550 pour futaba S3003
const int POS_MAX=2330; // largeur impulsion pour position 180° servomoteur
// POS_MAS=2330 pour futaba s3003
Déclaration des constantes de broches
- Déclaration des constantes pour les broches utilisées dans le programme :
const int broche_servo=2; //declaration constante de broche const int Voie_0=0; //declaration constante de broche analogique
Déclaration des variables globales
- Déclaration des variables globales du programmes :
- Déclaration des variables globales utilisées pour la conversion analogique-numérique
int mesure_brute=0;// Variable pour acquisition résultat brut de conversion analogique numérique float mesuref=0.0;// Variable pour calcul résultat décimal de conversion analogique numérique
-
- Déclaration des variables globales utiles : une variable pour stocker l’angle du servomoteur
int angle_servo=0; // variable pour angle du servomoteur
Déclarations des objets utiles pour les fonctionnalités utilisées
- Déclaration des objets utiles pour les fonctionnalités utilisées :
- Déclaration d’un objet servomoteur
Servo mon_servo; // crée un objet servo pour contrôler le servomoteur
8. Au niveau de la fonction d’initialisation setup( ) :
Initialisation des fonctionnalités utilisées :
- On initialise les différentes fonctionnalités utilisées :
- Initialisation du servomoteur : en se basant sur les valeurs extrêmes du servomoteur.
mon_servo.attach(broche_servo, POS_MIN, POS_MAX); // attache l'objet servo à la broche de commande du servomoteur
configuration des broches utilisées :
- Configuration des broches en sortie : met en sortie la broche de commande du servomoteur.
pinMode(broche_servo, OUTPUT); //met la broche en sortie
9. Au niveau de la boucle principale, la fonction loop ( ) :
- On commence par réaliser une mesure analogique-numérique avec l’instruction la broche analog 0 : la tension mesurée est fonction de la position de la résistance variable.
// acquisition conversion analogique numérique (100µs env.) //sur broche analogique indiquée - résultat 10bits (0-1023) mesure_brute=analogRead(Voie_0);
- Ensuite on réétalonne la valeur mesurée à l’aide de la très utile instruction ()pour obtenir l’angle correspondant à envoyer au servomoteur tel que 0V => 0° et 5V=>180°.
angle_servo=map(mesure_brute,0,1023,0,180); // convertit la valeur mesurée comprise entre 0 et 1023 en un angle entre 0 et 180 // map(value, fromLow, fromHigh, toLow, toHigh); // permet changement d'échelle simplifié
- Il ne reste plus à ce stade qu’à positionner le servomoteur à l’aide de l’instruction write(). On réalise ensuite une courte pause avant de recommencer.
mon_servo.write(angle_servo); // positionne le servo à l'angle voulu delay (100); // pause entre 2 mesures et modif position servomoteur
- Le programme recommence en boucle les instructions de la fonction loop( ). On remarquera toute la puissance du langage Arduino qui nous permet de caler la position du servomoteur sur la mesure issue de la résistance variable en seulement 3 instructions !
Se reporter aux commentaires présents dans le programme pour plus de détails.
10. Mise en oeuvre du programme
10.1 Préparation du montage et programmation de la carte Arduino :
- Commencer par réaliser le montage indiqué sur plaque d’expérimentation
- Ensuite, programmer la carte Arduino avec ce programme (en bas de page) selon la procédure habituelle
10.2 Fonctionnement
- Toute modification de la position de la résistance variable entraîne une modification du servomoteur en conséquence.
11. Le programme complet en langage Arduino :
A copier/coller directement dans l’éditeur Arduino
// --- Programme Arduino ---
// par X. HINAULT - 02/2010
// www.mon-club-elec.fr
// --- Que fait ce programme ? ---
/* Positionne un servomoteur à l'aide d'une résistance variable (potentiomètre) 10K*/
// --- Fonctionnalités utilisées ---
// Utilise la conversion analogique numérique 10bits sur les voies analogiques analog 0,
// Utilise les servomoteurs
// --- Circuit à réaliser ---
// Connecter sur la broche 2 (configurée en sortie) la broche de commande d'un servomoteur.
// Broche Analog 0 (=broche 14) en entrée Analogique :
// connecter la sortie d'une résistance variable connectée entre 0V et 5V.
//**************** Entête déclarative *******
// A ce niveau sont déclarées les librairies, les constantes, les variables...
// --- Inclusion des librairies utilisées ---
#include <Servo.h> // librairie pour servomoteur
// --- Déclaration des constantes ---
const int POS_MIN=550; // largeur impulsion pour position 0° servomoteur
// POS_MIN=550 pour futaba S3003
const int POS_MAX=2330; // largeur impulsion pour position 180° servomoteur
// POS_MAS=2330 pour futaba s3003
int angle_servo=0; // variable pour angle du servomoteur
// --- constantes des broches ---
const int broche_servo=2; //declaration constante de broche
const int Voie_0=0; //declaration constante de broche analogique
// --- Déclaration des variables globales ---
int mesure_brute=0;// Variable pour acquisition résultat brut de conversion analogique numérique
float mesuref=0.0;// Variable pour calcul résultat décimal de conversion analogique numérique
// --- Déclaration des objets utiles pour les fonctionnalités utilisées ---
Servo mon_servo; // crée un objet servo pour contrôler le servomoteur
//**************** FONCTION SETUP = Code d'initialisation *****
// La fonction setup() est exécutée en premier et 1 seule fois, au démarrage du programme
void setup() { // debut de la fonction setup()
// --- ici instructions à exécuter au démarrage ---
mon_servo.attach(broche_servo, POS_MIN, POS_MAX);
// attache l'objet servo à la broche de commande du servomoteur
// ------- Broches en sortie -------
pinMode(broche_servo, OUTPUT); //met la broche en sortie
// ------- Broches en entrée -------
// ------- Activation du rappel au + interne des broches en entrée si nécessaire -------
} // fin de la fonction setup()
// ********************************************************************************
//*************** FONCTION LOOP = Boucle sans fin = coeur du programme *************
// la fonction loop() s'exécute sans fin en boucle aussi longtemps que l'Arduino est sous tension
void loop(){ // debut de la fonction loop()
// --- ici instructions à exécuter par le programme principal ---
// acquisition conversion analogique numérique (100µs env.)
//sur broche analogique indiquée - résultat 10bits (0-1023)
mesure_brute=analogRead(Voie_0);
angle_servo=map(mesure_brute,0,1023,0,180);
// convertit la valeur mesurée comprise entre 0 et 1023 en un angle entre 0 et 180
// map(value, fromLow, fromHigh, toLow, toHigh); // permet changement d'échelle simplifié
mon_servo.write(angle_servo); // positionne le servo à l'angle voulu
delay (100); // pause entre 2 mesures et modif position servomoteur
} // fin de la fonction loop() - le programme recommence au début de la fonction loop sans fin
// ********************************************************************************
// --- Fin programme ---




