
Le traitement d’image est un domaine qui a connu une croissance exponentielle ces dernières années. Les algorithmes de traitement d’image sont devenus plus puissants et plus précis, et leur application s’est étendue à de nombreux domaines. Parmi les algorithmes les plus populaires, on trouve le filtre de Sobel, qui est utilisé pour détecter les bords d’une image. Dans cet article, nous allons voir comment le filtre de Sobel peut être amélioré en utilisant le framework Processing, Javacv et l’objet CvMat. Nous verrons comment ces outils peuvent être utilisés pour créer un filtre de Sobel amélioré qui peut être appliqué à des images pour détecter les bords plus précisément.
Processing : Javacv « inline » : Objet CvMat : Réalisation d’un filtre de Sobel amélioré.
Explications
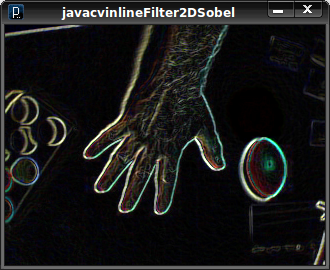
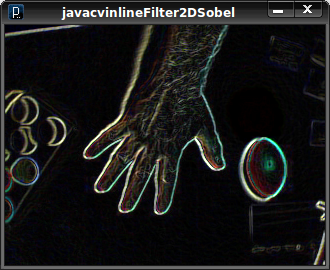
- Dans ce programme, on réalise le traitement d’une image à l’aide d’un double traitement par noyau de convolution par filtre de Sobel vertical puis horizontal afin d’extraire les contours. On combine ensuite les 2 résultats obtenus en une seule image.
- La librairie OpenCv fournit en la fonction native cvSobel qui permet de réaliser un filtre de Sobel sur une image, mais le noyau utilisé est à priori normalisé (c’est à dire que les valeurs du noyau de convolution sont divisées par la taille du noyau). En pratique, cela donne une détection moins franche qu’avec le noyau « brut » non normalisé. Ici, on appliquera donc un coefficient d’atténuation de la normalisation du noyau et donc une accentuation des contours, qui sera ainsi facilement réglable !
- Le résultat obtenu ici est une détection franche des bords dans une image, tout en limitant les « fausses détections », étape préalable indispensable à la détection des formes ou à l’analyse des contours.
Matériel et configuration utilisés
- PC Intel Core Quad 2.33 Ghz
- Ubuntu 10.04 LTS
- Processing 1-5
- OpenCV 2.3.1
- librairie javacv
Ressources utiles
- La documentation de la librairie OpenCV : http://opencv.itseez.com/
- La dernière version de la librairie OpenCV : Compilation/Installation d’OpenCV 2.3.1 sous Ubuntu 10.04 – PDF
- La librairie javacv, implémentation Java de la librairie openCV : http://code.google.com/p/javacv/ Cette librairie implémente en langage Java l’ensemble des fonctions et objets de la librairie openCV (écrite en C/C++) en langage Java. Cette librairie permet d’accéder relativement simplement aux fonctions d’openCV directement dans Processing notamment. Voir : Installation de la librairie javacv dans Processing – PDF
- Ma javadoc de la librairie javacv
Le programme
// généré avec le générateur de code Processing
// du site www.mon-club-elec.fr
// par X. HINAULT – tous droits réservés
// Programme écrit le : 9/10/2011.
// ——- Licence du code de ce programme : GPL v3—–
// This program is free software: you can redistribute it and/or modify
// it under the terms of the GNU General Public License as published by
// the Free Software Foundation, either version 3 of the License,
// or any later version.
// This program is distributed in the hope that it will be useful,
// but WITHOUT ANY WARRANTY; without even the implied warranty of
// MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the
// GNU General Public License for more details.
// You should have received a copy of the GNU General Public License
// along with this program. If not, see <http://www.gnu.org/licenses/>.
/////////////// Description du programme ////////////
// Utilise la librairie javacv qui implémente les fonctions natives d’OpenCV en Java
/*
Test de l’utilisation de la fonction native filter2D qui permet la réalisation de filtre par noyau de convolution personnalié
*/
// XXXXXXXXXXXXXXXXXXXXXX ENTETE DECLARATIVE XXXXXXXXXXXXXXXXXXXXXX
// inclusion des librairies utilisées
import com.googlecode.javacv.*; // importe librairie javacv
import com.googlecode.javacv.cpp.*; // importe librairie javacv.cpp
// librairie javacv par Samuel Audet : http://code.google.com/p/javacv/
// javacv implémente en Java les centaines de fonctions natives de la librairie OpenCV (2500 algorithmes) !
// les fonctions de javacv sont dès lors facilement utilisables « in line » dans le code Processing
// la librairie doit simplement être présente dans le répertoire Processing /mode/java/libraries/javacv/library/
// NB : La librairie javacv est basée sur la librairie javacpp du même auteur : http://code.google.com/p/javacpp/
import com.googlecode.javacpp.*; // importe librairie javacpp (à distinguer de javacv.cpp.*)
// librairie javacpp par Samuel Audet : http://code.google.com/p/javacpp/
// la librairie doit être présente dans le même répertoire /mode/java/libraries/javacv/library/
//– autres librairies utiles avec javacv —
import java.awt.image.BufferedImage; // importe la classe java BufferedImage
import java.nio.*; // pour classe ByteBuffer
import java.awt.Rectangle; // importe la classe Rectangle du langage Java
// l’objet rectangle fournit les champs x,y du centre et hauteur/largeur (height/width) du rectangle
// déclaration objets
PImage imgSrc, imgDest; // déclare un/des objets PImage (conteneur d’image Processing)
// déclare un/des objets IplImage (conteneur image natif librairie OpenCV) utiles
opencv_core.IplImage iplImgSrc, iplImgDest, iplImgGray, iplImgMask, iplImgTrans, iplImgTransGx, iplImgTransGy, iplImg8UC3_Gx, iplImg8UC3_Gy ;
// déclaration variables globales
//—— déclaration des variables de couleur utiles —-
int jaune=color(255,255,0);
int vert=color(0,255,0);
int rouge=color(255,0,0);
int bleu=color(0,0,255);
int noir=color(0,0,0);
int blanc=color(255,255,255);
int bleuclair=color(0,255,255);
int violet=color(255,0,255);
// variable pour la taille de la capture video
int widthCapture=320; // largeur capture
int heightCapture=240; // hauteur capture
int fpsCapture=20; // framerate (image/secondes) pour la capture video
// XXXXXXXXXXXXXXXXXXXXXX Fonction SETUP XXXXXXXXXXXXXXXXXXXXXX
void setup(){ // fonction d’initialisation exécutée 1 fois au démarrage
// —- initialisation paramètres graphiques utilisés
colorMode(RGB, 255,255,255); // fixe format couleur R G B pour fill, stroke, etc…
fill(0,0,255); // couleur remplissage RGB – noFill() si pas de remplissage
stroke (0,0,0); // couleur pourtour RGB – noStroke() si pas de pourtour
rectMode(CORNER); // origine rectangle : CORNER = coin sup gauche | CENTER : centre
imageMode(CORNER); // origine image : CORNER = coin sup gauche | CENTER : centre
ellipseMode(CENTER); // origine cercles / ellipses : CENTER : centre (autres : RADIUS, CORNERS, CORNER
//strokeWeight(0); // largeur pourtour
frameRate(30);// Images par seconde – The default rate is 60 frames per second
// — initialisation fenêtre de base —
size(widthCapture,heightCapture); // ouvre une fenêtre xpixels x ypixels
background(0,0,0); // couleur fond fenetre
// — initialisation des objets et fonctionnalités utilisées —
//======== Code exemple utilisation javacv « in line » =========
//— chargement d’un fichier image
String cheminFichier=« /home/hinault/Bureau/trans/monimage.png »; // chemin absolu du fichier utilisé
iplImgSrc= opencv_highgui.cvLoadImage(cheminFichier); // chargement d’un fichier dans l’IplImage
opencv_core.CvSize mySize=iplImgSrc.cvSize(); // récupère la taille de l’image – Cvsize est un objet contenant 2 valeurs
//— création de 2 objets IplImage pour calcul des gradients Sobel en vertical et horizontal
//iplImgTransGx= opencv_core.cvCreateImage(mySize, iplImgSrc.depth(), iplImgSrc.nChannels()); // crée une image IplImage idem
//iplImgTransGy= opencv_core.cvCreateImage(mySize, iplImgSrc.depth(), iplImgSrc.nChannels()); // crée une image IplImage idem
iplImgTrans= opencv_core.cvCreateImage(mySize, opencv_core.IPL_DEPTH_16S, iplImgSrc.nChannels()); // crée une image IplImage 16S
opencv_core.cvConvertScale(iplImgSrc, iplImgTrans, 256.0, –32768); // convertit 8U en 16S
iplImgTransGx= opencv_core.cvCreateImage(mySize, opencv_core.IPL_DEPTH_16S, iplImgSrc.nChannels()); // crée une image IplImage 16S
iplImgTransGy= opencv_core.cvCreateImage(mySize, opencv_core.IPL_DEPTH_16S, iplImgSrc.nChannels()); // crée une image IplImage 16S
iplImg8UC3_Gx= opencv_core.cvCreateImage(mySize, opencv_core.IPL_DEPTH_8U, iplImgSrc.nChannels()); // crée une image IplImage 16S
iplImg8UC3_Gy= opencv_core.cvCreateImage(mySize, opencv_core.IPL_DEPTH_8U, iplImgSrc.nChannels()); // crée une image IplImage 16S
//— création d’une image IplImage destination —
iplImgDest= opencv_core.cvCreateImage(mySize, iplImgSrc.depth(), iplImgSrc.nChannels()); // crée une image IplImage idem
println(« debut: »+millis()); // debug – evaluation durée
//— initialisation des objets utiles pour le traitement d’image par noyau de convolution
int kernelSize=3; // pour kernel 3×3
FloatPointer myPtr = new FloatPointer(kernelSize*kernelSize); // crée un pointeur de (kernelSize x kernelSize) floats pour le noyau
float value=0.0; // variable calcul kernel normalisé – en fait pas vraiment utilisée ici
// pour chaque élément du kerne (i,j), on aura : value = (1/kernelSize x kernelSize) * kernel[i][j]
float coeffNorm=4.0; // coeff pour accentuer le pourtour (= effectuer normalisation partielle du noyau..)
//— création d’une matrice 2D pour le noyau, de taille kernelSize x kernelSize et de type Float
//static opencv_core.CvMat cvMat(int rows, int cols, int type, com.googlecode.javacpp.Pointer data)
//opencv_core.CvMat matrix= opencv_core.cvMat(1, 256, opencv_core.CV_16UC1, myPtr) ; // crée un CvMat avec même taille de donnée unitaire
opencv_core.CvMat matrix2D= opencv_core.cvMat(kernelSize, kernelSize, opencv_core.CV_32F, myPtr) ; // crée un CvMat avec même taille de donnée unitaire
//******************* application du noyau Sobel x **********************
//— définition du noyau de convolution à utiliser —
// — kernel 3×3 Sobel x —
float[][] kernelGx = {{+1,0,-1}, // déclaration des valeurs entières à utiliser
{+2,0,-2},
{+1,0,-1}};
//—- remplissage du kernel Gx—-
for (int i=0; i < kernelSize; i++) {
for (int j=0; j< kernelSize; j++) {
value=coeffNorm * kernelGx[i][j] / (kernelSize*kernelSize); // calcul valeur normalisée du kernel – coeffNorm atténue la normalisation et accentue le contour
//value=kernelGx[i][j]; // si utilisation de la valeur non normalisée. Peut donner meilleur résultat dans certains cas… cf Sobel
//static void cvSet2D(opencv_core.CvArr arr, int idx0, int idx1, opencv_core.CvScalar value)
opencv_core.cvSet2D(matrix2D, i, j, opencv_core.cvScalarAll(value)); // remplit le CvMat à l’index (i,j) voulu avec la valeur normalisée
// debug
//print (« Kernel [« +i+ »] [« +j+ »] = « + kernelGx[i][j]);
//println( » | Valeur normalisée (« +i+ », »+j+ ») = »+opencv_core.cvGet2D(matrix2D,i,j).val(0)); // lit la valeur (i,j)… utilise fonction .val(index) du scalar renvoyé par cvGet2D
} // fin j
} //fin i
//— application du noyau normalisé à l’image source —
//static void cvFilter2D(opencv_core.CvArr src, opencv_core.CvArr dst, opencv_core.CvMat kernel, opencv_core.CvPoint anchor)
opencv_imgproc.cvFilter2D(iplImgTrans, iplImgTransGx, matrix2D, opencv_core.cvPoint (–1,-1)) ;
//******************* application du noyau Sobel y **********************
// — kernel 3×3 Sobel y —
float[][] kernelGy = {{+1,+2,+1}, // déclaration des valeurs entières à utiliser
{0,0,0},
{–1,-2,-1}};
//—- remplissage du kernel Gy—-
for (int i=0; i < kernelSize; i++) {
for (int j=0; j< kernelSize; j++) {
value=coeffNorm * kernelGy[i][j] / (kernelSize*kernelSize); // calcul valeur normalisée du kernel – coeffNorm atténue la normalisation et accentue le contour
//value=kernelGy[i][j]; // si utilisation de la valeur non normalisée. Peut donner meilleur résultat dans certains cas… cf Sobel
//static void cvSet2D(opencv_core.CvArr arr, int idx0, int idx1, opencv_core.CvScalar value)
opencv_core.cvSet2D(matrix2D, i, j, opencv_core.cvScalarAll(value)); // remplit le CvMat à l’index (i,j) voulu avec la valeur normalisée
// debug
//print (« Kernel [« +i+ »] [« +j+ »] = « + kernelGy[i][j]);
//println( » | Valeur normalisée (« +i+ », »+j+ ») = »+opencv_core.cvGet2D(matrix2D,i,j).val(0)); // lit la valeur (i,j)… utilise fonction .val(index) du scalar renvoyé par cvGet2D
} // fin j
} //fin i
//— application du noyau normalisé à l’image source —
//static void cvFilter2D(opencv_core.CvArr src, opencv_core.CvArr dst, opencv_core.CvMat kernel, opencv_core.CvPoint anchor)
opencv_imgproc.cvFilter2D(iplImgTrans, iplImgTransGy, matrix2D, opencv_core.cvPoint (–1,-1)) ;
//******************* application des Sobel x et y dans une même image **********************
//—- combinaison des 2 gradients sobel vertical et horizontal dans la même image
//static void cvAdd(opencv_core.CvArr src1, opencv_core.CvArr src2, opencv_core.CvArr dst, opencv_core.CvArr mask)
// théoriquement, il faut faire sqrt(Gx² + Gy²)
// en pratique on peut approximer à |Gx|+|Gy|
// NB : filter2D renvoie des images 8U non signés si on utilise des image 8U pour le filtre
// donc on « perd » les valeurs négatives fournies par le Sobel : appliquer par conséquent le Sobel sur valeur 16S
opencv_core.cvConvertScaleAbs(iplImgTransGx, iplImg8UC3_Gx,1.0/256,0); // passer en valeur absolue et en 8 bits
opencv_core.cvConvertScaleAbs(iplImgTransGy, iplImg8UC3_Gy,1.0/256,0);
//opencv_core.cvConvertScale(iplImgTransGx, iplImg8UC3_Gx,1.0/256,64); // didactique – pour visualiser les fronts haut et bas renvoyés par Sobel
//opencv_core.cvConvertScale(iplImgTransGy, iplImg8UC3_Gy,1.0/256,64);
// le shift (dernière valeur de la fonction) fixe le niveau moyen de l’image – utiliser < 128 pour éviter image trop blanche…
//opencv_core.cvConvertScale(iplImgTransGx, iplImgTransGx,1.0/256,128); // non – passer par la valeur absolue et image 8U
//opencv_core.cvConvertScale(iplImgTransGy, iplImgTransGx,1.0/256,128);
//opencv_core.cvAdd(iplImgTransGx, iplImgTransGy, iplImgDest,null);
opencv_core.cvAdd(iplImg8UC3_Gx, iplImg8UC3_Gy, iplImgDest,null);
println(« fin: »+millis()); // debug – affiche fin durée
//— affiche IplImage dans Processing via un PImage —
//imgDest=toPImage(iplImgGray); // transfère IplImage dans PImage
imgDest=toPImage(iplImgDest); // transfère IplImage dans PImage
//imgDest=toPImage(iplImgTransGx); // transfère IplImage dans PImage -debug
image(imgDest,0,0); // affiche le PImage
} // fin fonction Setup
// XXXXXXXXXXXXXXXXXXXXXX Fonction Draw XXXXXXXXXXXXXXXXXXXX
void draw() { // fonction exécutée en boucle
// while(true); // stoppe boucle draw
} // fin de la fonction draw()
// XXXXXXXXXXXXXXXXXXXXXX Autres Fonctions XXXXXXXXXXXXXXXXXXXXXX
//—- fonction toPimage : transfère un IplImage dans un PImage
PImage toPImage (opencv_core.IplImage iplImgIn) { // reçoit un IplImage et renvoie un PImage
//— récupérer l’objet IplImage dans un BufferedImage
BufferedImage bufImg=iplImgIn.getBufferedImage(); // récupère IplImage dans un objet BufferedImage transitoire
//—- créer un PImage —
PImage imgOut = createImage(iplImgIn.width(),iplImgIn.height(), RGB); // création d’un PImage de même taille que IplImage
// charge les pixels de l’image buffer dans le tableau imgOut.pixels du PImage
bufImg.getRGB(0, 0, iplImgIn.width(), iplImgIn.height(), imgOut.pixels, 0,iplImgIn.width());
imgOut.updatePixels(); // met à jour le PImage
return(imgOut); // renvoie le PImage
} // fin toPImage
//XXXXXXXXXXXXXXXXXX Fin du programme XXXXXXXXXXXXXXXXX




