
Le traitement du signal est une technique très importante dans le domaine de l’ingénierie et de l’informatique. La convolution est l’un des outils les plus utilisés pour le traitement du signal. Il permet de modifier un signal d’entrée pour en produire un signal de sortie. Dans cet article, nous allons examiner en détail le principe de la convolution et ses applications dans le traitement du signal. Nous verrons comment elle peut être utilisée pour modifier un signal et comment elle peut être appliquée à des applications pratiques.
Principe de la convolution en traitement d’image
Principe général
- La convolution consiste à recalculer la valeur d’un pixel donné d’une image de départ (image Source) en se basant sur la valeur du pixel lui-même et sur la valeur des pixels environnants le pixel à recalculer.
- Chaque pixel environnant est affecté d’un coefficient de calcul, l’ensemble des coefficients utilisés sont regroupés dans un tableau de valeurs (appelé aussi « matrice »). Ce tableau est appelé le masque.
- La valeur finale du pixel dans l’image finale (image destination) correspond à un calcul prenant en compte tous les pixels environnants du pixel de départ et le pixel de départ, combinés un à un aux coefficients du masque.
Ressources utiles :
- l’excellent cours de traitement d’image de l’ENSTA : http://www.ensta-paristech.fr/~manzaner/Support_Cours.html
Expression mathématique de la convolution
où :
- x et y sont les coordonnées d’un pixel de l’image.
- f[x,y] correspond à la valeur du pixel, soit en niveau de gris, à une valeur entre 0 et 255.
L’image résultante de la convolution pourra être notée :
où :
- x et y sont les coordonnées du pixel de l’image
- f_new_[x,y] correspond à la nouvelle valeur du pixel.
Le masque de convolution est lui-même une fonction discrète que l’on peut appeler h, de [x_1_,x_2_] x [y_1_,y_2_].
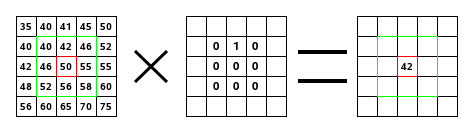
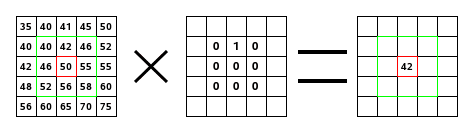
La convolution correspondra à :
Autrement dit, on multipliera la valeur de chaque pixel pris en compte par la valeur correspondante du noyau de convolution et on additionnera l’ensemble. La valeur obtenue sera la valeur du pixel final.
Les masques (ou filtres) de convolution utilisés
- Les valeurs utilisés pour les masques correspondent en fait à une approximation en valeurs entières (on dit également « valeurs discrètes ») de la fonction mathématique appliquée à l’image.
- De nombreux masques sont au format 3×3. Par exemple :
- D’autres masques sont au format 5×5. Par exemple :
- Plus le masque est grand et plus les calculs à effectuer seront longs. Certaines fonctions sont cependant difficiles à approximer en matrices 3×3 (par exemple la fonction Gaussienne).
Les principaux masques de convolution
Liens utiles :
Bon à savoir : Le logiciel de traitement d’image Gimp permet de tester des masques de convolution simplement. Voir ici : http://docs.gimp.org/fr/plug-in-convmatrix.html
Exemple de code Processing type appliquant un filtre par convolution à une image.
// www.mon-club-elec.fr – Par X.HINAULT – Tous droits réservés – Mai 2011 – Licence GPL
PImage filtreLaplacien8 (PImage imgIn) { //————- début fonction filtre Laplacien convexité 8 ——————-
PImage imgLaplacien8; // image qui sera renvoyée par la fonction
imgLaplacien8=imgIn.get(); // crée une image à partir image reçue par la fonction
imgLaplacien8.loadPixels(); // charge les pixels de l’image en mémoire
//————- définition du masque Laplacien convexité 8 – matrice 3 x 3 ————-
// 1 1 1
// 1 -8 1
// 1 1 1
int LP8[][] = new int[3][3];
// 3×3 Mask
LP8[0][0] = 1;
LP8[0][1] = 1;
LP8[0][2] = 1;
LP8[1][0] = 1;
LP8[1][1] = –8;
LP8[1][2] = 1;
LP8[2][0] = 1;
LP8[2][1] = 1;
LP8[2][2] = 1;
//————- variables de canaux couleurs des pixels ——
int sumR = 0;
int sumG = 0;
int sumB = 0;
//————— passage en revue des pixels de l’image ————-
for(int y = 0+1; y < imgLaplacien8.height–1; y++) {// —- défilement des y en excluant la première et dernière ligne
// car le calcul sobel nécessite 1 pixel autour du pixel calculé
for(int x = 0+1; x < imgLaplacien8.width–1; x++) { // —- défilement des x en excluant la première et dernière ligne
// car le calcul sobel nécessite 1 pixel autour du pixel calculé
// convolution horizontale
// Convolve across the X axis and return gradiant aproximation
//——- parcourt les pixels autour du pixel à évaluer – détection lignes horizontales—
//—- nombre pixels pris en compte = idem taille matrice
for(int i = –1; i <= 1; i++) {
for(int j = –1; j <= 1; j++){
color col = imgIn.get(x + i, y + j); // récupère la couleur du pixel à prendre en compte à partir image de départ
float r = red(col); // récupère le rouge
float g = green(col); // récupère le vert
float b = blue(col); // récupère le bleu
sumR = sumR + (int(r) * LP8[ i + 1][ j + 1]); // applique le masque sur le canal rouge
sumG = sumG + (int(g) *LP8[ i + 1][ j + 1]); // applique le masque sur le canal vert
sumB = sumB + (int(b) *LP8[ i + 1][ j + 1]); // applique le masque sur le canal bleu
} // fin for j
} // fin for i
//sumR=abs(sumR);
//sumG=abs(sumR);
//sumB=abs(sumR);
constrain(sumR,0,255);
constrain(sumG,0,255);
constrain(sumB,0,255);
//—— recalcule les pixels —-
imgLaplacien8.pixels[ x + (y * imgLaplacien8.width) ] = color(sumR, sumG, sumB);
//— RAZ des variables —-
sumR=0;
sumG=0;
sumB=0;
} // fin for x
} // fin for y
//img1.updatePixels(); // met à jour les pixels
imgLaplacien8.updatePixels(); // met à jour les pixels
return imgLaplacien8; // renvoie l’image modifiée
} //—————- fin filtre Laplacien 8 —————–




